")
































歐姆龍plc做pid控制在通風(fēng)機(jī)監(jiān)控系統(tǒng)的應(yīng)用
在風(fēng)力發(fā)電系統(tǒng)中,歐姆龍PLC PID控制槳距技術(shù)涉及風(fēng)力渦輪機(jī)的安全可靠運(yùn)行,影響風(fēng)力渦輪機(jī)的使用壽命,歐姆龍plc通風(fēng)機(jī)監(jiān)視梯形圖平滑輸出功率,減小扭矩振蕩并減少機(jī)艙控制俯仰角。振蕩不僅可以優(yōu)化輸出功率,還可以有效降低噪聲,穩(wěn)定發(fā)電機(jī)的輸出功率,并改善葉片和整個(gè)機(jī)器的應(yīng)力條件。可變槳距風(fēng)力渦輪機(jī)具有比固定槳距風(fēng)力渦輪機(jī)更好的風(fēng)能捕獲特性,并且現(xiàn)代大型風(fēng)力渦輪機(jī)大多使用槳距控制。
本文針對(duì)國(guó)外知名風(fēng)電公司的液壓變槳距風(fēng)力發(fā)電機(jī)組,采用可編程控制器(PLC)作為風(fēng)力發(fā)電機(jī)的變槳控制器。變槳控制器具有控制方式靈活,編程簡(jiǎn)單,抗干擾能力強(qiáng)的特點(diǎn)。介紹了液壓變槳系統(tǒng)的工作原理,設(shè)計(jì)了變槳控制器的軟件系統(tǒng)。最后,對(duì)著名的國(guó)外風(fēng)力發(fā)電公司的風(fēng)力渦輪機(jī)進(jìn)行了實(shí)驗(yàn),驗(yàn)證了槳距控制器可以在變槳距風(fēng)力渦輪機(jī)上安全穩(wěn)定地運(yùn)行。
1、引言
隨著風(fēng)電技術(shù)的不斷成熟和發(fā)展,變槳距風(fēng)力發(fā)電機(jī)的優(yōu)越性更加突出:它可以提高風(fēng)電機(jī)組運(yùn)行的可靠性,并可以保證較高的風(fēng)能利用系數(shù)和不斷優(yōu)化的輸出功率曲線。具有可變槳距機(jī)構(gòu)的風(fēng)力渦輪機(jī)可以減輕葉輪的重量并大大改善整個(gè)機(jī)器的應(yīng)力狀況,使風(fēng)力渦輪機(jī)在不同風(fēng)速下保持最佳轉(zhuǎn)換效率,最大化輸出功率并提高系統(tǒng)性能。
隨著風(fēng)力發(fā)電機(jī)功率等級(jí)的增加,變槳技術(shù)的使用是時(shí)代的潮流。目前,有兩種主要類型的變槳執(zhí)行器:液壓變槳距和電動(dòng)變槳距。根據(jù)它們的控制方法,它們可以分為兩種類型:均勻間距和獨(dú)立間距。獨(dú)立變槳技術(shù)是在統(tǒng)一俯仰的基礎(chǔ)上發(fā)展起來的,每個(gè)葉片根據(jù)自身的控制規(guī)律獨(dú)立改變俯仰角,可以有效解決葉片和塔架負(fù)荷不均勻的問題,結(jié)構(gòu)緊湊簡(jiǎn)單。它易于應(yīng)用各種控制和高可靠性,并越來越受到國(guó)際風(fēng)電市場(chǎng)的歡迎。 兆瓦變速恒頻變槳距風(fēng)力渦輪機(jī)是世界上最先進(jìn)的風(fēng)力渦輪機(jī)類型。
從未來的發(fā)展趨勢(shì)來看,它將不可避免地取代固定間距風(fēng)力發(fā)電機(jī)并成為風(fēng)力發(fā)電機(jī)的主要模型。其中,變槳技術(shù)在變速恒頻風(fēng)力發(fā)電機(jī)的研究中發(fā)揮著重要作用,是實(shí)現(xiàn)變速恒頻技術(shù)的前提。研究這項(xiàng)技術(shù),提高風(fēng)力發(fā)電機(jī)的靈活性,延長(zhǎng)機(jī)組壽命是國(guó)外研究的熱門話題。但是,這個(gè)國(guó)家的研究很少。
該項(xiàng)目由這個(gè)具有前瞻性的項(xiàng)目資助,擁有獨(dú)立的知識(shí)產(chǎn)權(quán)。控制技術(shù)對(duì)于打破發(fā)達(dá)國(guó)家對(duì)先進(jìn)風(fēng)電技術(shù)的壟斷,推動(dòng)中國(guó)風(fēng)電產(chǎn)業(yè)的進(jìn)一步發(fā)展具有重要意義。 為了在變槳系統(tǒng)中獲得足夠高可靠性的控制器,歐姆龍的CJ1M系列可編程控制器用作變槳系統(tǒng)的控制器,并設(shè)計(jì)了歐姆龍PLC軟件程序。在一家著名的國(guó)外風(fēng)力發(fā)電公司的風(fēng)力渦輪機(jī)上進(jìn)行了實(shí)驗(yàn)。
2、變槳距風(fēng)力機(jī)及其控制方式
變槳距調(diào)速是現(xiàn)代風(fēng)力渦輪機(jī)的主要速度控制方法之一。圖1示出了可變槳距風(fēng)力渦輪機(jī)的簡(jiǎn)化圖。調(diào)速器通過增加槳距角來減小由于風(fēng)速的增加而使葉輪加速的趨勢(shì)。當(dāng)風(fēng)速增加時(shí),俯仰液壓缸移動(dòng),推動(dòng)葉片沿增加俯仰角的方向旋轉(zhuǎn),以減小葉片吸收的風(fēng)能,并保持風(fēng)力渦輪機(jī)在額定速度范圍內(nèi)運(yùn)行。當(dāng)風(fēng)速降低時(shí),執(zhí)行相反的操作,并且風(fēng)輪吸收的功率保持基本恒定。液壓控制系統(tǒng)具有傳動(dòng)扭矩大,重量輕,剛性高,定位準(zhǔn)確,液壓執(zhí)行機(jī)構(gòu)動(dòng)態(tài)響應(yīng)快的優(yōu)點(diǎn),可以保證葉片更快更準(zhǔn)確地調(diào)節(jié)到預(yù)定的螺距[4] [ 5]。目前,我國(guó)生產(chǎn)和經(jīng)營(yíng)的大型風(fēng)力發(fā)電機(jī)的大多數(shù)變距裝置都使用液壓系統(tǒng)作為動(dòng)力系統(tǒng)。
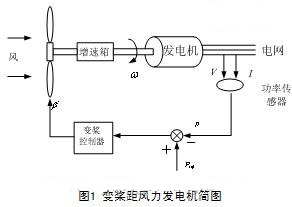
圖2顯示了槳距控制器的框圖。在發(fā)動(dòng)機(jī)集成到電網(wǎng)中之前,速度控制器根據(jù)發(fā)動(dòng)機(jī)速度反饋信號(hào)進(jìn)行變槳控制,并根據(jù)速度和風(fēng)速信號(hào)確定葉片處于待機(jī)或羽狀位置;在發(fā)動(dòng)機(jī)集成到電網(wǎng)中之后,功率控制器起作用,功率調(diào)節(jié)器通常由PI(或PID)控制,并且功率誤差信號(hào)經(jīng)受PI操作以獲得槳距角位置。
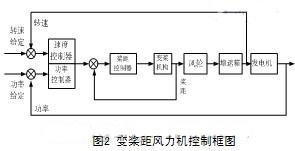
當(dāng)風(fēng)力渦輪機(jī)處于停止?fàn)顟B(tài)時(shí),俯仰角為90°,此時(shí)氣流不會(huì)對(duì)葉片產(chǎn)生扭矩;當(dāng)風(fēng)力渦輪機(jī)從停止?fàn)顟B(tài)變?yōu)檫\(yùn)行狀態(tài)時(shí),俯仰角為90度,一定速度(約1/s)減小到待機(jī)角度(本系統(tǒng)為15);如果風(fēng)速達(dá)到網(wǎng)格風(fēng)速,則俯仰角繼續(xù)減小到3(當(dāng)俯仰角大約為3時(shí)獲得最佳風(fēng)能吸收)系數(shù));發(fā)電機(jī)接入電網(wǎng)后,當(dāng)風(fēng)速低于額定風(fēng)速時(shí),俯仰角保持在3;當(dāng)風(fēng)速高于額定風(fēng)速時(shí),根據(jù)功率反饋信號(hào),控制器向比例閥輸出-10V。 10V電壓,控制比例閥輸出流量的方向和大小。變槳液壓缸通過比例閥輸出的流量和方向操縱葉片的槳距角,以保持輸出功率接近額定功率。如果發(fā)生故障或停止命令,控制器將輸出快速羽化命令,允許風(fēng)力渦輪機(jī)快速關(guān)閉,羽化速度高達(dá)20/s。
3、變槳控制器的設(shè)計(jì)
3.1系統(tǒng)的硬件構(gòu)成
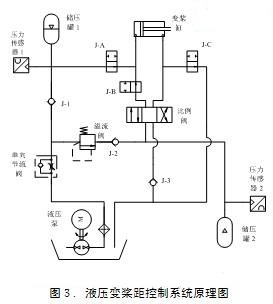
在該實(shí)驗(yàn)中,使用外國(guó)風(fēng)力公司的眾所周知的風(fēng)力發(fā)電機(jī)作為實(shí)驗(yàn)對(duì)象。額定功率550KW,采用液壓變槳系統(tǒng)。液壓變槳系統(tǒng)的示意圖如圖3所示。從圖3中可以看出,液壓比例閥的螺距可以通過改變液壓比例閥的電壓來改變。當(dāng)風(fēng)力發(fā)電機(jī)出現(xiàn)故障或緊急停止時(shí),電磁閥JB可以關(guān)閉,JA和JC可以打開,蓄壓器可以打開。 1中的液壓油快速進(jìn)入變槳缸并將葉片推到順槳位置(90)。
該系統(tǒng)使用歐姆龍的CJ1M系列PLC。發(fā)電機(jī)的功率信號(hào)由高速功率變送器以模擬量(0~10V對(duì)應(yīng)功率0~800KW)的形式輸入PLC,槳距角反饋信號(hào)(0~10V對(duì)應(yīng)槳距角) 0~90)模擬量輸入到PLC的模擬輸入單元;液壓傳感器1,2也以模擬量的形式輸入。這里,選擇四個(gè)模擬輸入單元CJ1W-AD041;模擬輸出單元為CJ1W-DA021,輸出信號(hào)為-10V至10V,信號(hào)輸出到比例閥,控制音高或彈出速度;機(jī)器的速度由高速計(jì)數(shù)單元CJW-CT021選擇。通過連接到發(fā)生器的光電編碼盤檢測(cè)發(fā)生器的速度,并且每轉(zhuǎn)10個(gè)脈沖輸入到計(jì)數(shù)單元CJW-CT021。
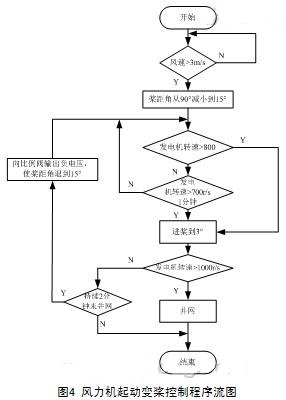
3.2 系統(tǒng)的軟件設(shè)計(jì) 系統(tǒng)的主要功能由歐姆龍PLC PID實(shí)現(xiàn)。當(dāng)滿足風(fēng)力渦輪機(jī)啟動(dòng)條件時(shí),歐姆龍PLC PID發(fā)出命令以將葉片槳距角從90°恒定速度減小;當(dāng)發(fā)電機(jī)連接到電網(wǎng)時(shí),歐姆龍plc根據(jù)反饋功率進(jìn)行功率調(diào)節(jié)。保持低于額定風(fēng)速的高風(fēng)能吸收系數(shù)。在額定風(fēng)速以上,通過調(diào)節(jié)俯仰角將輸出功率維持在額定功率。當(dāng)出現(xiàn)故障停止或緊急停止信號(hào)時(shí),PLC控制電磁閥J-A和J-C打開,J-B關(guān)閉,使葉片快速切換到俯仰角為90°的位置。 二手pac根據(jù)音調(diào)控制程序流程如圖學(xué)生溪所示。
當(dāng)風(fēng)速高于起始風(fēng)速時(shí),歐姆龍PLC PID指令通過模擬輸出單元向比例閥輸出1.8V電壓,使葉片以0.9/s的速度變?yōu)?5。此時(shí),如果發(fā)電機(jī)的速度大于800r/min或速度持續(xù)超過700r/min持續(xù)一分鐘,則刀片繼續(xù)進(jìn)入槳葉至3位置。當(dāng)PLC檢測(cè)到高速計(jì)數(shù)單元的速度信號(hào)大于1000r/min時(shí),它發(fā)出并網(wǎng)命令。如果在達(dá)到第3檔后2分鐘沒有將俯仰角連接到電網(wǎng),則模擬輸出單元將向比例閥輸出-4.1V的電壓,并且俯仰角將縮回到15位置。
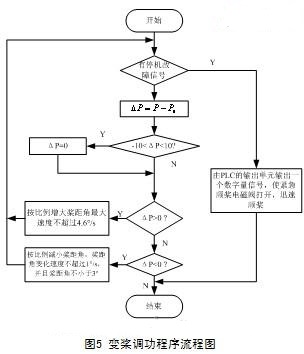
在發(fā)電機(jī)連接到電網(wǎng)后,通過調(diào)節(jié)俯仰角來調(diào)節(jié)發(fā)電機(jī)的輸出功率。功率調(diào)整程序的流程圖如圖5所示。當(dāng)實(shí)際功率大于額定功率時(shí),PLC的模擬輸出單元CJ1W-DA021輸出與功率偏差成比例的電壓信號(hào),并使用LMT命令將輸出電壓限制在-4.1V(對(duì)應(yīng)于4.6/s的俯仰速度)。當(dāng)功率偏差小于零時(shí),必須進(jìn)入槳葉以增加功率。當(dāng)槳葉進(jìn)給時(shí),輸出到比例閥的最大電壓為1.8V(對(duì)應(yīng)于0.9/s的槳距速度)。為了防止頻繁的往復(fù)俯仰,當(dāng)功率偏差為10kW時(shí)不進(jìn)行俯仰。
在槳距plc控制系統(tǒng)中,高風(fēng)速部分的可變槳距調(diào)節(jié)功率是非常重要的部分。如果卸載速度太慢,會(huì)發(fā)生過功率或過流,甚至發(fā)電機(jī)也會(huì)燒毀;如果調(diào)整速度太快,不僅會(huì)出現(xiàn)調(diào)整現(xiàn)象,輸出功率也會(huì)大幅波動(dòng),節(jié)距和變槳軸承的使用壽命會(huì)縮短。它會(huì)影響發(fā)電機(jī)的輸出功率并減少發(fā)電量。在該系統(tǒng)中,不同的槳距速度用于過功率卸載和欠功率饋送。卸載速度高于進(jìn)給速度,這防止發(fā)電機(jī)功率在大陣風(fēng)的情況下過高。 圖6是俯仰功率調(diào)節(jié)部分的梯形圖。 100.08是啟動(dòng)功率調(diào)整命令。
當(dāng)滿足功率調(diào)整條件時(shí),繼電器100.08從0變?yōu)?; D2100存儲(chǔ)發(fā)動(dòng)機(jī)功率與實(shí)際功率之間的偏差。當(dāng)偏差ΔP滿足-10kW <1。 δp< 10kw,0分配給D2100;當(dāng)功率偏差為負(fù)時(shí),60.07為1,d2100中的功率偏差按一定比例縮放,并通過lmt命令限制輸出到比例閥。輸出的最小值對(duì)應(yīng)-4.1v電壓;如果繼電器60.07為0,即功率偏差為正,則通過scl3命令對(duì)d2100的值進(jìn)行定標(biāo),并通過lmt命令輸出到比例閥,最大輸出電壓為1.8v。
總結(jié):以上就是小編對(duì)歐姆龍plc pid控制在通風(fēng)機(jī)監(jiān)控系統(tǒng)的應(yīng)用個(gè)人見解,如果這方面的問題和需要,可以聯(lián)系我們的在線客服或者熱線電話咨詢!
標(biāo)題:歐姆龍plc做pid控制在通風(fēng)機(jī)監(jiān)控系統(tǒng)的應(yīng)用 地址:http://www.bjhtsyw.cn/gongsi/3804.html

鐘指令在電力行業(yè)的plc控制系統(tǒng)運(yùn)用")
電源")

平臺(tái)發(fā)布")
原理說明")

介紹")

據(jù)輸入方法")
構(gòu)和各部件的作用")
內(nèi)部干擾")